蜗杆传动¶
6.1 特点和类型¶
- 作用:传递交错轴(一般为 \(90^{\circ}\))之间的回转运动和动力。
- 形成:单个斜齿轮齿数很少(如 \(z_1 = 1\)),且 \(\beta_1\) 很大。所得齿轮为蜗杆,啮合件为蜗轮。
传动特点¶
- 优点
- 传动比大
- 结构紧凑
- 传动平稳
- 噪声小
- 自锁性好
- 缺点
- 传动效率低
- 蜗轮齿圈用青铜制造,成本高
类型¶
- 形状
- 圆柱蜗杆
- 环面蜗杆
- 螺旋面形状
- 阿基米德蜗杆
- 渐开线蜗杆
6.2 圆柱蜗杆传动主要参数¶
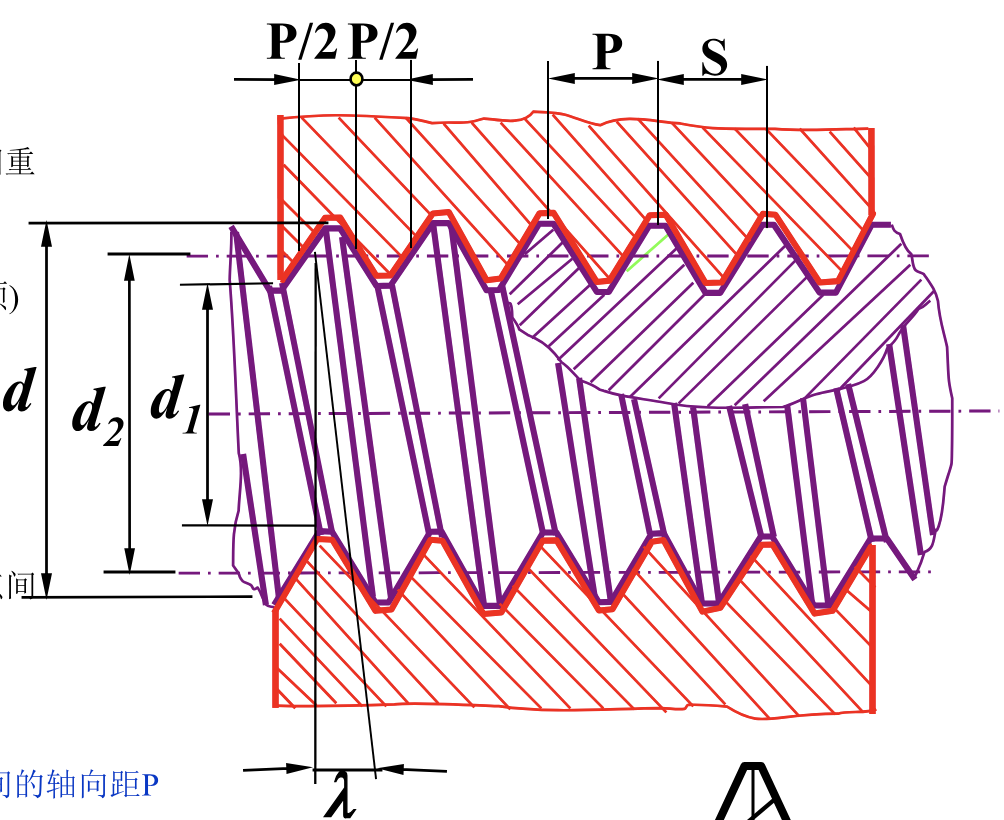
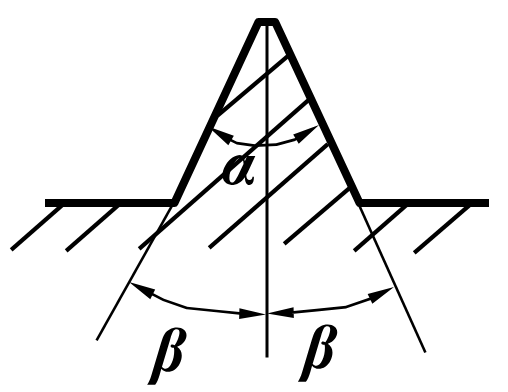
模数 \(m\) 和压力角 \(\alpha\)¶
- \(P_{a1}\):蜗杆的轴面齿距
- \(P_{t2}\):蜗轮的端面齿距
- \(m_1\):蜗杆的轴面模数
- \(m_2\):蜗轮的端面模数
- \(\alpha_{a1}\):蜗杆的轴面压力角
- \(\alpha_{t2}\):蜗轮的端面压力角
- 正确啮合条件:\(m_1 = m_2 = m\),\(\alpha_{a1} = \alpha_{t2} = \alpha\),\(P_{a1} = P_{t2}\)
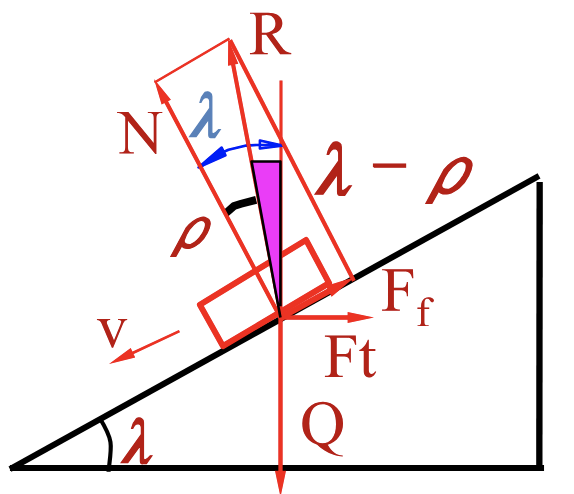
分度圆直径 \(d_1\) 和螺旋升角 \(\lambda\)¶
\[ \tan \lambda = \frac{h}{\pi d_1} = \frac{z_1 P_{a1}}{\pi d_1} = \frac{m z_1}{d_1} \]
- 蜗杆直径系数 \(q\)
传动比 \(i\)、蜗杆头数 \(z_1\) 和蜗轮齿数 \(z_2\)¶
- 蜗杆头数 \(z_1\):螺旋线的数目
- 转动比:
\[ i = \frac{n_1}{n_2} = \frac{z_2}{z_1} \]
几何尺寸计算¶
\(i \to z_1 \to z_2 \to\) 计算求得 \(m, d_1 \to\) 计算几何尺寸
6.3 运动分析和受力分析¶
运动分析¶
\[ \vec{v}_2 = \vec{v}_1 + \vec{v}_{21} \]
手势确定蜗轮转向:
右旋蜗杆:伸出左手,四指顺着蜗杆转向,则蜗轮的切向速度 \(v_{p2}\) 方向为大拇指方向。
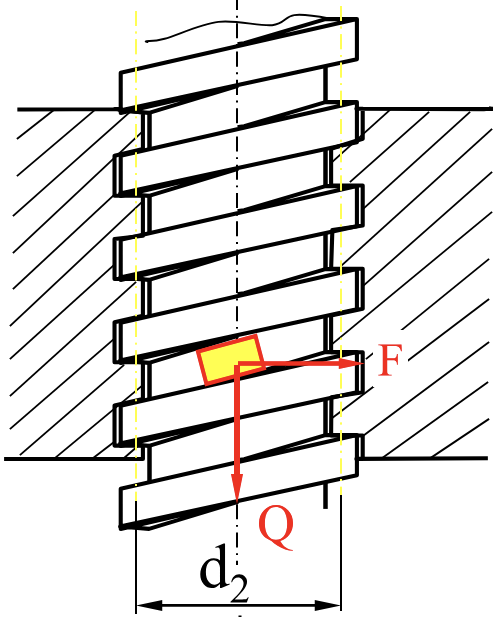
受力分析¶
类似于斜齿轮,法向力可分解为三个分力:
- 圆周力 \(F_t\)
- 轴向力 \(F_a\)
- 径向力 \(F_r\)

\[ \begin{aligned} F_{t1} &= F_{a2} = \frac{2T_1}{d_1} \\ F_{a1} &= F_{t2} = \frac{2T_2}{d_2} \\ F_{r1} &= F_{r2} = F_{t2} \tan \alpha \end{aligned} \]
- \(T_1, T_2\):蜗杆和蜗轮的转矩
- \(F_{t1}\) 与蜗杆在该点的速度方向相反
- \(F_{t2}\) 与蜗轮在该点的速度方向相同
\[ T_2 = T_1 i \eta \]
