Preknowledge¶
Linear Algebra¶
Cofactor matrix \(\mathbf{C}\) of a matrix \(\mathbf{A}\) is defined as \(C_{ij} = (-1)^{i+j} M_{ij}\), where \(M_{ij}\) is the determinant of the submatrix obtained by deleting the \(i\)-th row and \(j\)-th column of \(\mathbf{A}\).
Linear Elasticity¶
- Displacements: \(u, v, w\)
- Stresses: \(\sigma_x, \sigma_y, \sigma_z, \tau_{xy}, \tau_{yz}, \tau_{zx}\)
- Strains: \(\varepsilon_x, \varepsilon_y, \varepsilon_z, \gamma_{xy}, \gamma_{yz}, \gamma_{zx}\)
\[ \text{Displacement} \xleftrightarrow{\varepsilon_{ij} = \frac{1}{2} (u_{i,j} + u_{j,i})} \text{Strains} \xleftrightarrow{\sigma_{ij} = C_{ijkl} \varepsilon_{kl}} \text{Stresses} \xleftarrow{\sigma_{ij,j} + f_i = 0} \]
Strain-Displacement Relation¶
\[ \boldsymbol{\varepsilon} = \underset{\text{Gradient Operator}}{\underbrace{\begin{bmatrix} \frac{\partial}{\partial x} & 0 & 0 \\ 0 & \frac{\partial}{\partial y} & 0 \\ 0 & 0 & \frac{\partial}{\partial z} \\ \frac{\partial}{\partial y} & \frac{\partial}{\partial x} & 0 \\ 0 & \frac{\partial}{\partial z} & \frac{\partial}{\partial y} \\ \frac{\partial}{\partial z} & 0 & \frac{\partial}{\partial x} \end{bmatrix}}} \begin{bmatrix} u \\ v \\ w \end{bmatrix} = \nabla \mathbf{u} \]
Stress-Strain Relation¶
Isotropic material:
\[ \sigma_{ij} = \lambda \varepsilon_{kk} \delta_{ij} + 2 \mu \varepsilon_{ij} \]
where
\[ \lambda = \frac{E \nu}{(1 + \nu)(1 - 2 \nu)}, \quad \mu = \frac{E}{2 (1 + \nu)} \]
\(\boldsymbol{\sigma} = \mathbf{D} \boldsymbol{\varepsilon}\), where \(\mathbf{D}\) is the Material stiffness matrix.
Equilibrium Equations¶
\[ \begin{aligned} \sigma_{ij,j} + f_i = 0 & \implies \begin{bmatrix} \frac{\partial}{\partial x} & 0 & 0 \\ 0 & \frac{\partial}{\partial y} & 0 \\ 0 & 0 & \frac{\partial}{\partial z} \\ \frac{\partial}{\partial y} & \frac{\partial}{\partial x} & 0 \\ 0 & \frac{\partial}{\partial z} & \frac{\partial}{\partial y} \\ \frac{\partial}{\partial z} & 0 & \frac{\partial}{\partial x} \end{bmatrix}^T \begin{bmatrix} \sigma_x \\ \sigma_y \\ \sigma_z \\ \tau_{xy} \\ \tau_{yz} \\ \tau_{zx} \end{bmatrix} + \begin{bmatrix} f_x \\ f_y \\ f_z \end{bmatrix} = \mathbf{0} \\[2ex] & \implies \nabla^T \boldsymbol{\sigma} + \mathbf{f} = \mathbf{0} \end{aligned} \]
Boundary Conditions (BCs)¶
- Displacement BCs: \(\mathbf{u} = \bar{\mathbf{u}}\) on \(\Gamma_u\)
- Traction BCs: \(\sigma_{ij} n_j = \bar{T}_i\) on \(\Gamma_\sigma\)
\[ \begin{bmatrix} n_x & 0 & 0 & n_y & 0 & n_z \\ 0 & n_y & 0 & n_x & n_z & 0 \\ 0 & 0 & n_z & 0 & n_y & n_x \end{bmatrix} \begin{bmatrix} \sigma_x \\ \sigma_y \\ \sigma_z \\ \tau_{xy} \\ \tau_{yz} \\ \tau_{zx} \end{bmatrix} = \begin{bmatrix} \bar{T}_x \\ \bar{T}_y \\ \bar{T}_z \end{bmatrix} \implies \mathbf{n} \boldsymbol{\sigma} = \overline{\mathbf{T}} \]
Energy Principles¶
Principal of Virtual Work¶
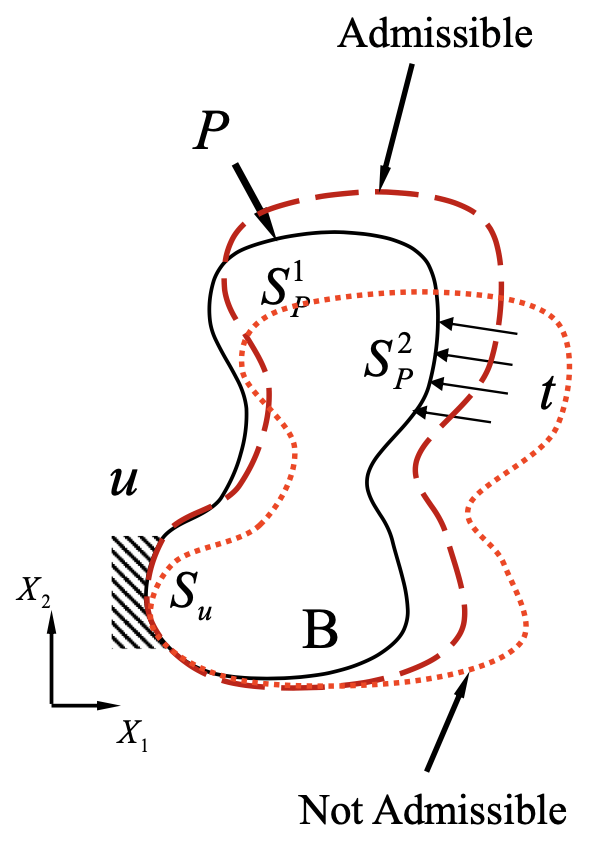
- Admissible displacements: A set of displacements that satisfy the geometric constraints
- Virtual displacements: A set of small displacement variations upon which the geometric constraints are satisfied
\[ \underset{\text{Virtual strain energy of\\ the internal stresses}}{\underbrace{\int_B \sigma_{ij} \delta \varepsilon_{ij} \, \mathrm{d}V}} = \int_B f_i \delta u_i \, \mathrm{d}V + \int_{\partial B} \bar{T}_i \delta u_i \, \mathrm{d}S \]