Bar/Truss¶
4.1 Introduction¶
Bar: Axial load only, no bending or shearing.
| Local | Global |
|---|---|
| \(x, y\) | \(X, Y\) |
| \(u_i', v_i' = 0\) | \(u_i, v_i\) |
| 1 dof at node \(i\) | 2 dof at node \(i\) |
Firstly, we investigate a bar in the local coordinate system, then we perform coordinate transformation for a bar in the global system.
4.2 Bar Element in Local Coordinates¶
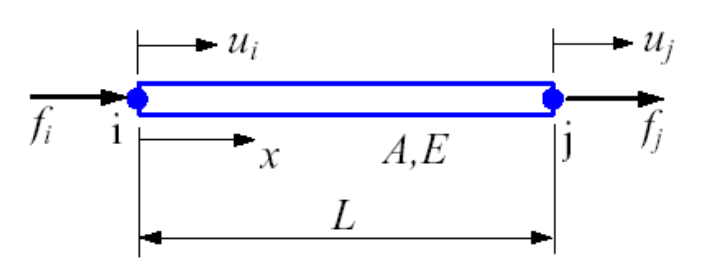
Select a Displacement Function¶
\[ u(x) = a_0 + a_1 x \]
BCs: \(u(0) = u_i, u(L) = u_j\), so
\[ u(x) = u_i + \frac{u_j - u_i}{L} x \]
Rewrite the above equation in terms of nodal displacements:
\[ u(x) = \left( 1 - \frac{x}{L} \right) u_i + \frac{x}{L} u_j = \begin{bmatrix} N_i & N_j \end{bmatrix} \begin{bmatrix} u_i \\ u_j \end{bmatrix} \]
4.3 Selecting Approximation Functions for Displacements¶
In FEA, we use polynomials to approximate the displacement field within an element.
\[ \begin{aligned} u(x, y, z) &= a_0 + a_1 x + b_1 y + c_1 z + \cdots \\ &= N_1(x, y, z) u_1 + N_2(x, y, z) u_2 + \cdots + N_n(x, y, z) u_n \\ &= \sum_{i=1}^n N_i u_i \end{aligned} \]
\(N_i(x, y, z)\) are shape functions. At node \(i\), \(u(x_i, y_i, z_i) = u_i\), so
\[ N_i(x_j, y_j, z_j) = \delta_{ij} \]
Also note that shape functions allow rigid body motion, thus
\[ \sum_{i=1}^n N_i = 1 \]
Convergence of a FEA¶
- Completeness: Be able to represent the rigid body motion and constant strain states within the element.
- \(u(x)\) contains constants and linear terms.
- Compatibility: continuity between adjacent elements and within the element.
- \(C^0\) continuity: displacement continuous across element boundaries, e.g. bar element
- \(C^1\) continuity: displacement and its first derivative continuous, e.g. beam element
Selection of Displacement Functions¶
\[ \begin{array}{c} & & & 1 & & & \\ & & x & \vdots & y & & \\ & & x^2 & xy & y^2 & & \\ & x^3 & x^2 y & \vdots & x y^2 & y^3 & \\ & x^4 & x^3 y & x^2 y^2 & x y^3 & y^4 & \\ x^5 & x^4 y & x^3 y^2 & \vdots & x^2 y^3 & x y^4 & y^5 \end{array} \]
- Completeness
- Compatibility
- No preference on any coordinates